Research Projects
Exploring robotics, computer vision, and autonomous systems through hands-on research at Northeastern University and Mercedes-Benz R&D.
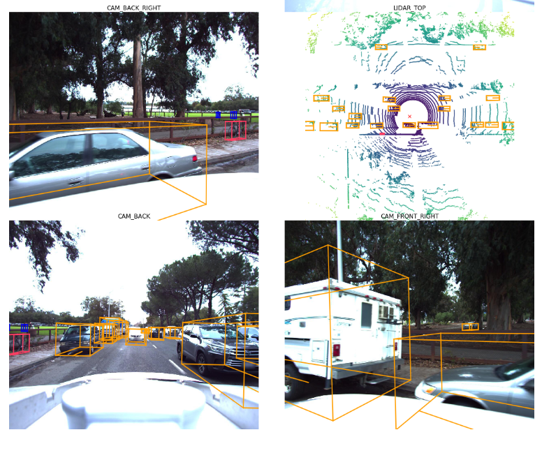
3D Object Detection
LiDAR-based 3D object detection using voxelization and bird's eye view for autonomous driving applications.
LEGO LOAM vs SC-LEGO LOAM
Comparative study on LiDAR odometry and mapping using data from NUANCE autonomous vehicle platform.

Image Captioning via Transformers
Transformer-based image captioning model combining computer vision and NLP for descriptive caption generation.
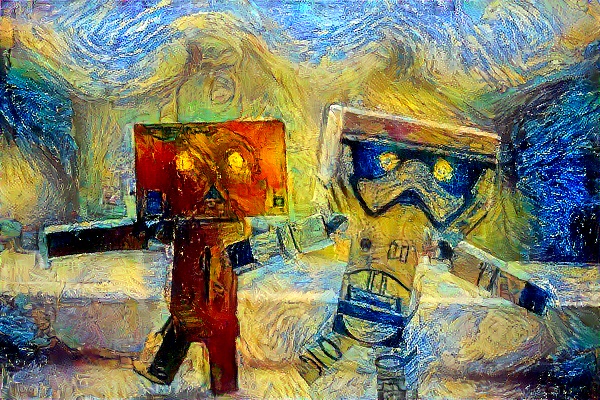
Style Transfer + Super Resolution
Combined style transfer with SRGAN for high-resolution artistic image generation.

Traffic Sign Recognition
Deep learning approach using transfer learning and data augmentation for robust traffic sign classification.

Shadow Removal via Entropy Minimization
Single-image shadow removal using entropy minimization without camera calibration or multiple exposures.